Wed, Apr 6, 2016
The video shows a little experiment I have been working on in the last days: training a convolutional neural network using Keras and Theano to “follow” a sidewalk. The output of the classifier are three probabilities that represent if the best option is to continue forward, turn left or turn right (the overlaid green arrow correspond to the highest probability).
Mon, Dec 28, 2015
Time-lapse photography is a technique whereby the frequency at which film frames are captured (the frame rate) is much lower than that used to view the sequence. Online there are hundreds of thousands of webcams that record images at regular intervals of 10-30 minutes. By merging these sequences of photos is possible to obtain beautiful videos. Smartlapse is an image processing pipeline that I am implementing to improve the smoothness of these videos. In the example above I have created a comparison between a timelapse and a smartlapse from a day of recording of the webcam Vallée Blanche Arete from Aiguille du Midi - Chamonix.
Thu, Jan 1, 2015
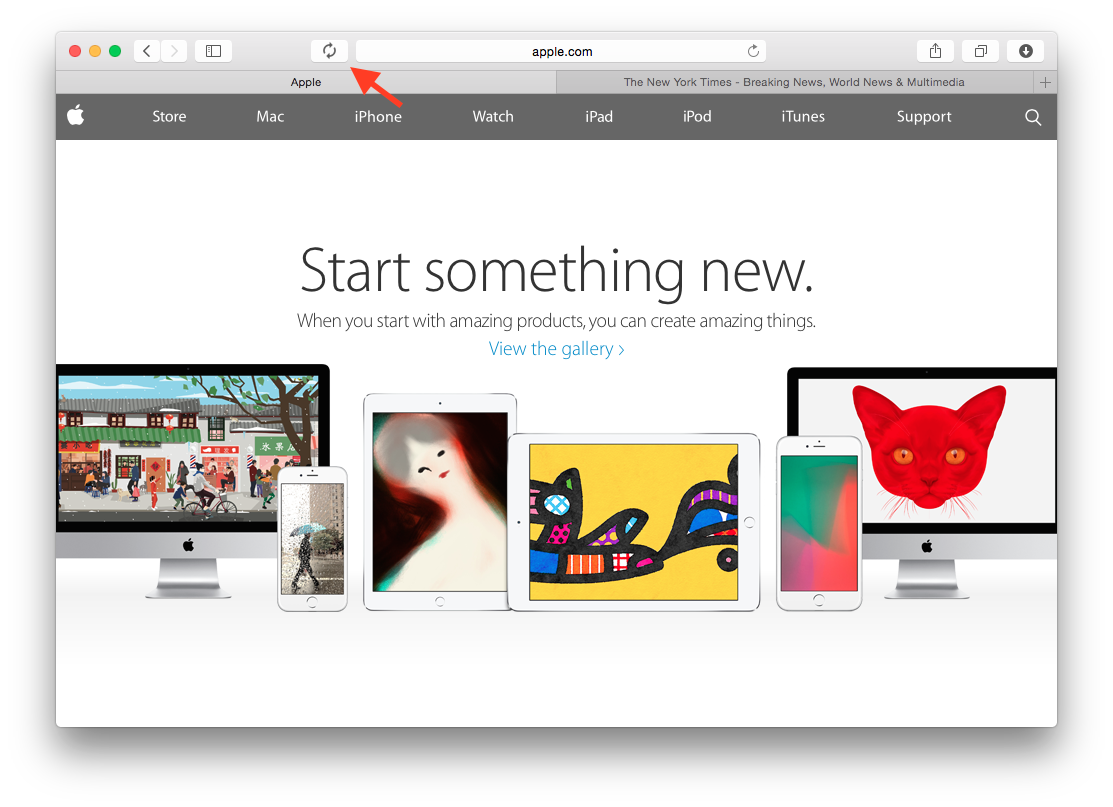 Tabs are an essential part of the everyday browsing life. I always have open a browser window with a few tabs with webpages that I check several times throughout the day (e.g. Twitter, Hacker News, Techmeme, etc.).
I have built a very simple Safari extension that adds a toolbar button to reload all the open tabs of the current window.
Tabs are an essential part of the everyday browsing life. I always have open a browser window with a few tabs with webpages that I check several times throughout the day (e.g. Twitter, Hacker News, Techmeme, etc.).
I have built a very simple Safari extension that adds a toolbar button to reload all the open tabs of the current window.
Thu, Mar 20, 2014
My Master’s Thesis is entitled “People Detection and Tracking from a Small-footprint Mobile Ground Robot using an RGB-D Sensor” and deals with the problem of robustly detecting people on a cluttered environment from an unusual and difficult point of view, where the legs are the most prominent feature.
Sun, Mar 24, 2013
During my masters, I particularly enjoined studying computer vision, robotics, artificial intelligence, machine learning and consequently I have added to my study plan all those exams pertaining to these fields. For instance, I found very interesting and educational the experience of building an autonomous mobile robot from scratch during the interdisciplinary course “Robotics and Design”.